
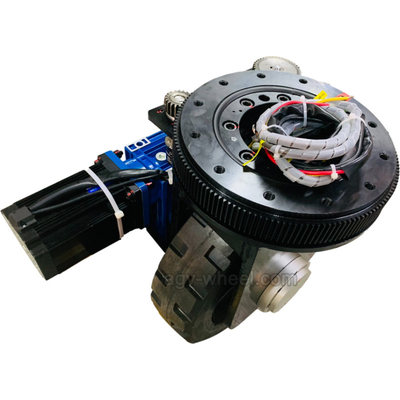
Το λαστιχένιο βήμα 2T φορτώνει τις υψηλές έλξης εναλλασσόμενου ρεύματος μηχανών Drive ρόδες ρομπότ ροδών 15km/H βαρέων καθηκόντων
-
Υψηλό φως
2T ρόδα Drive μηχανών εναλλασσόμενου ρεύματος
,15km/h ρόδα Drive μηχανών εναλλασσόμενου ρεύματος
,15km/h βαρέων καθηκόντων ρόδες ρομπότ
-
Βήμα ροδώνΛάστιχο Soild
-
Διάμετρος ροδών400mm
-
Φορτίο2t
-
ταχύτητα15km/h
-
Δύναμη έλξης2000W
-
Δύναμη οδήγησης750W
-
Εκτιμημένη ροπή παραγωγής143Nm
-
Σκηνή χρήσηςΥπαίθριος
-
Τόπος καταγωγήςGuangzhou, Κίνα
-
ΜάρκαZHLUN
-
Αριθμό μοντέλουZl-490
-
Ποσότητα παραγγελίας minΔιαπραγματεύσιμος
-
ΤιμήNegotiable
-
Συσκευασία λεπτομέρειεςΣυσκευασία: Ξύλινο κιβώτιο
-
Χρόνος παράδοσης25 ημέρες
-
Όροι πληρωμήςL/C, T/T
-
Δυνατότητα προσφοράς1000 κομμάτια το μήνα
Το λαστιχένιο βήμα 2T φορτώνει τις υψηλές έλξης εναλλασσόμενου ρεύματος μηχανών Drive ρόδες ρομπότ ροδών 15km/H βαρέων καθηκόντων

Λαστιχένια βήματος βαρέων καθηκόντων ρομπότ ανά τροχό 2T δύναμη έλξης φορτίων υψηλή
Προδιαγραφή
|
Αριθ.
|
Στοιχείο
|
Μονάδα
|
Στοιχεία
|
|
1
|
Ύψος εγκατάστασης
|
χιλ.
|
490
|
|
2
|
Φορτίο
|
Κλ
|
2000
|
|
3
|
Τύπος μηχανών
|
/
|
BLDC/Servo
|
|
4
|
Μηχανή έλξης
|
KW
|
2
|
|
5
|
Αναλογία ταχύτητας
|
/
|
1:15
|
|
6
|
Μηχανή οδήγησης
|
KW
|
0,75
|
|
7
|
Ταχύτητα
|
km/h
|
15
|
|
8
|
Διάμετρος ροδών
|
χιλ.
|
400
|
|
9
|
Πλάτος ροδών
|
χιλ.
|
100
|
|
10
|
Αισθητήρας
|
/
|
Προαιρετικός
|
|
11
|
Max.Torque
|
NM
|
143
|
|
Μερικές παράμετροι μπορούν να ρυθμιστούν
|
|||
Χαρακτηριστικά γνωρίσματα
Η αντιδονητική δομή των ροδών και ο μηχανισμός οδήγησης υψηλός-ροπής των ροδών με τα εκλεπτυμένα κυλώντας ρουλεμάν σχεδιάζονται αυστηρά για να καλύψουν τις λειτουργικές απαιτήσεις.
Με βάση τη συγκεκριμένη δυναμική σχεδιαγράμματος και οχημάτων ροδών, το περιστροφικό κινηματικό πρότυπο καθώς επίσης και τα ευθέα και περιστροφικά δυναμικά πρότυπα AGV καθιερώνονται.
Για να ελέγξουν καλά τα χαρακτηριστικά κινήσεων των ροδών κάτω από το βαρύ φορτίο σε τρία κράτη κινήσεων συμπεριλαμβανομένης της ευθείας κίνησης, της μόνος-περιστροφής και της περιστροφής γύρω από ένα ορισμένο σημείο, οι προσομοιώσεις στο Adams και τα πειράματα όλα εργοστασίων έχουν πραγματοποιηθεί.
Τα αποτελέσματα προσομοίωσης δείχνουν ότι οι κανονικές και δυνάμεις τριβής των ροδών είναι πολύ σταθερές εκτός από μερικές μικρές ταλαντώσεις, οι οποίες προκαλούνται από τη διανομή μη-κεντρικών φορτίων AGV.
Τα πειραματικά αποτελέσματα για την οδήγηση της ταχύτητας AGV άμεσα έχουν καταδείξει ότι η ακρίβεια προσδιορισμού θέσης της είναι αρκετή για τη χρήση στις πραγματικές γραμμές συνελεύσεων αεροσκαφών.
Ένα νέο υπαίθριο σχέδιο σχεδιαγράμματος των ροδών για πανκατευθυντικό βαρέων καθηκόντων AGV προτείνεται, το οποίο ενισχύει τη λειτουργούσα και κινούμενη ικανότητα AGV. Μια λειτουργία της ανθρώπου-μηχανής συνεργασίας προσφέρεται επίσης από AGV για τη μεταφορά των μεγάλων κομματιών προς κατεργασία έξυπνα και οικονομικά στο αεροδιάστημα και άλλες βαριές βιομηχανίες.
![]()
![]()
![]()
Τα προϊόντα μας πωλούνται σε όλο τον κόσμο. Μπορείτε να είστε σίγουροι για ολόκληρη τη διαδικασία των προϊόντων μας.